緊湊型人形機(jī)器人SEA驅(qū)動(dòng)器 集成力矩/位置傳感器與諧波減速器的機(jī)械設(shè)計(jì)方案
隨著服務(wù)機(jī)器人、醫(yī)療康復(fù)及仿生科技的發(fā)展,對(duì)高性能、高集成度驅(qū)動(dòng)單元的需求日益迫切。其中,串聯(lián)彈性驅(qū)動(dòng)器(Series Elastic Actuator,SEA)以其固有的柔順性、高力矩帶寬及能量效率,成為先進(jìn)機(jī)器人關(guān)節(jié)驅(qū)動(dòng)的關(guān)鍵解決方案。本文聚焦于一種專為緊湊型人形機(jī)器人設(shè)計(jì)的SEA驅(qū)動(dòng)器機(jī)械方案,其核心創(chuàng)新在于深度集成力矩傳感器、位置傳感器與諧波減速器,實(shí)現(xiàn)了高扭矩密度、高精度控制與緊湊結(jié)構(gòu)的統(tǒng)一。
一、 總體設(shè)計(jì)目標(biāo)與架構(gòu)
設(shè)計(jì)目標(biāo):
1. 高集成度與緊湊性:適應(yīng)人形機(jī)器人肢體狹小空間,尤其是踝、腕、手指等關(guān)節(jié)。
2. 高扭矩輸出與柔順性:通過彈性元件與諧波減速器組合,實(shí)現(xiàn)大扭矩、低沖擊的力/位混合控制。
3. 高精度感知:原位、同步、精確測(cè)量關(guān)節(jié)輸出力矩與絕對(duì)位置。
4. 高可靠性:結(jié)構(gòu)堅(jiān)固,適于長(zhǎng)期動(dòng)態(tài)負(fù)載。
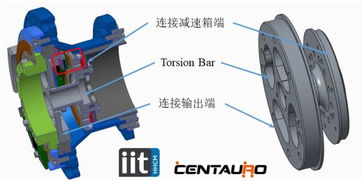
核心架構(gòu):采用經(jīng)典的“電機(jī) + 彈性元件 + 減速器”串聯(lián)布局,但進(jìn)行了深度集成優(yōu)化。動(dòng)力傳遞路徑為:無框伺服電機(jī) -> 高剛度扭矩傳感器(作為彈性元件與力矩傳感一體)-> 諧波減速器 -> 輸出法蘭(集成絕對(duì)位置傳感器)。
二、 關(guān)鍵機(jī)械組件設(shè)計(jì)方案
1. 一體化力矩傳感彈性體
- 結(jié)構(gòu)與原理:摒棄傳統(tǒng)獨(dú)立的彈簧與力矩傳感器,設(shè)計(jì)一個(gè)經(jīng)有限元優(yōu)化的精密金屬彈性體(如十字梁、雙剪切梁結(jié)構(gòu))。該彈性體在承受扭矩時(shí)產(chǎn)生可測(cè)量的微小形變。
- 傳感集成:在彈性體形變敏感區(qū)域直接貼裝高精度應(yīng)變片,組成全橋電路。此設(shè)計(jì)將力矩測(cè)量與機(jī)械柔順功能合二為一,極大減少了軸向尺寸,并提高了力矩測(cè)量的帶寬和響應(yīng)速度。
- 過載保護(hù):彈性體設(shè)計(jì)包含機(jī)械限位,防止因意外沖擊導(dǎo)致應(yīng)變片或諧波減速器損壞。
2. 諧波減速器的集成與選型
- 選型考量:選擇超薄、短杯規(guī)格的諧波減速器,以最小化徑向與軸向尺寸。減速比根據(jù)目標(biāo)關(guān)節(jié)的峰值扭矩與速度需求確定(通常在80:1至160:1之間)。
- 連接設(shè)計(jì):
- 輸入端:諧波減速器的波發(fā)生器通過一個(gè)高剛度的膜片聯(lián)軸器與力矩傳感彈性體的輸出端連接,補(bǔ)償微小同軸度誤差,避免徑向力影響力矩測(cè)量精度。
- 輸出端:諧波減速器的剛輪固定于驅(qū)動(dòng)器外殼,柔輪輸出端直接與最終輸出法蘭連接。
- 散熱與潤(rùn)滑:外殼設(shè)計(jì)考慮諧波減速器工作時(shí)的發(fā)熱,采用導(dǎo)熱良好的材料,并可能集成微型散熱鰭片或?qū)釒А4_保潤(rùn)滑密封長(zhǎng)效可靠。
3. 絕對(duì)位置傳感器的集成
- 傳感器選擇:采用非接觸式、高分辨率絕對(duì)位置傳感器,如磁性編碼器或電容式編碼器。它們體積小、抗污染、壽命長(zhǎng)。
- 安裝位置:
- 電機(jī)側(cè):在電機(jī)轉(zhuǎn)子后端集成一個(gè)增量式編碼器,用于電機(jī)本身的換相與速度控制。
- 關(guān)節(jié)輸出側(cè)(關(guān)鍵):將絕對(duì)位置傳感器的磁環(huán)或碼盤直接安裝在輸出法蘭的背面,讀數(shù)頭固定于外殼。此設(shè)計(jì)直接測(cè)量經(jīng)過減速器后的最終輸出軸絕對(duì)角度,完全規(guī)避了齒輪側(cè)隙、彈性體扭轉(zhuǎn)變形等中間環(huán)節(jié)誤差,為機(jī)器人提供最準(zhǔn)確的關(guān)節(jié)位置反饋。
4. 緊湊殼體與軸承布置
- 殼體:采用鋁合金經(jīng)精密加工而成,分為前、中、后三部分,形成模塊化密封腔體。殼體同時(shí)作為所有部件的安裝基準(zhǔn)和散熱體。
- 軸承系統(tǒng):
- 輸出法蘭采用一對(duì)高精度角接觸球軸承,以承受來自末端的徑向與軸向負(fù)載。
- 電機(jī)軸與彈性體輸入軸通過深溝球軸承支撐,確保轉(zhuǎn)動(dòng)平穩(wěn)。
- 走線與接口:所有傳感器線纜(應(yīng)變片電橋、編碼器)通過殼體上的防水接插件引出,內(nèi)部走線槽設(shè)計(jì)避免與運(yùn)動(dòng)部件干涉。
三、 工作流程與性能優(yōu)勢(shì)
- 力矩控制:當(dāng)關(guān)節(jié)受到外部力時(shí),力通過輸出法蘭、諧波減速器傳遞至一體化彈性體,使其產(chǎn)生形變。應(yīng)變片電橋輸出與扭矩成正比的電壓信號(hào),控制器據(jù)此實(shí)時(shí)調(diào)整電機(jī)電流,實(shí)現(xiàn)精確的力矩或阻抗控制。
- 位置控制:輸出端的絕對(duì)編碼器提供關(guān)節(jié)的實(shí)時(shí)精確角度,結(jié)合電機(jī)編碼器的速度反饋,實(shí)現(xiàn)高精度的位置伺服,同時(shí)可通過力矩反饋實(shí)現(xiàn)柔順的位置調(diào)整。
- 性能優(yōu)勢(shì):
- 空間效率:深度集成設(shè)計(jì)使軸向長(zhǎng)度比傳統(tǒng)分體式SEA縮短30%以上。
- 控制性能:力矩測(cè)量緊鄰負(fù)載端,帶寬高;輸出端絕對(duì)位置測(cè)量,精度高。
- 安全性:彈性體提供了物理柔順性和過載保護(hù)。
- 可靠性:諧波減速器無背隙,傳動(dòng)精度高;整體密封設(shè)計(jì)適應(yīng)復(fù)雜環(huán)境。
四、 應(yīng)用與展望
此設(shè)計(jì)方案特別適用于對(duì)重量和尺寸極其敏感的雙足人形機(jī)器人、外骨骼機(jī)器人和靈巧手。它為實(shí)現(xiàn)動(dòng)態(tài)行走、安全人機(jī)交互和精細(xì)操作提供了理想的關(guān)節(jié)驅(qū)動(dòng)單元。未來優(yōu)化方向包括采用更先進(jìn)的復(fù)合材料彈性體、集成電子驅(qū)動(dòng)板(構(gòu)成機(jī)電一體化模塊)以及開發(fā)基于此硬件的先進(jìn)柔順控制算法,進(jìn)一步推動(dòng)高性能緊湊型機(jī)器人的發(fā)展。
最新產(chǎn)品